Cette tâche se focalise sur le développement de machines polyphasées, tolérantes aux pannes.
T2.1 : Conception de machines électriques polyphasées tolérantes aux pannes adaptées à l’intégration
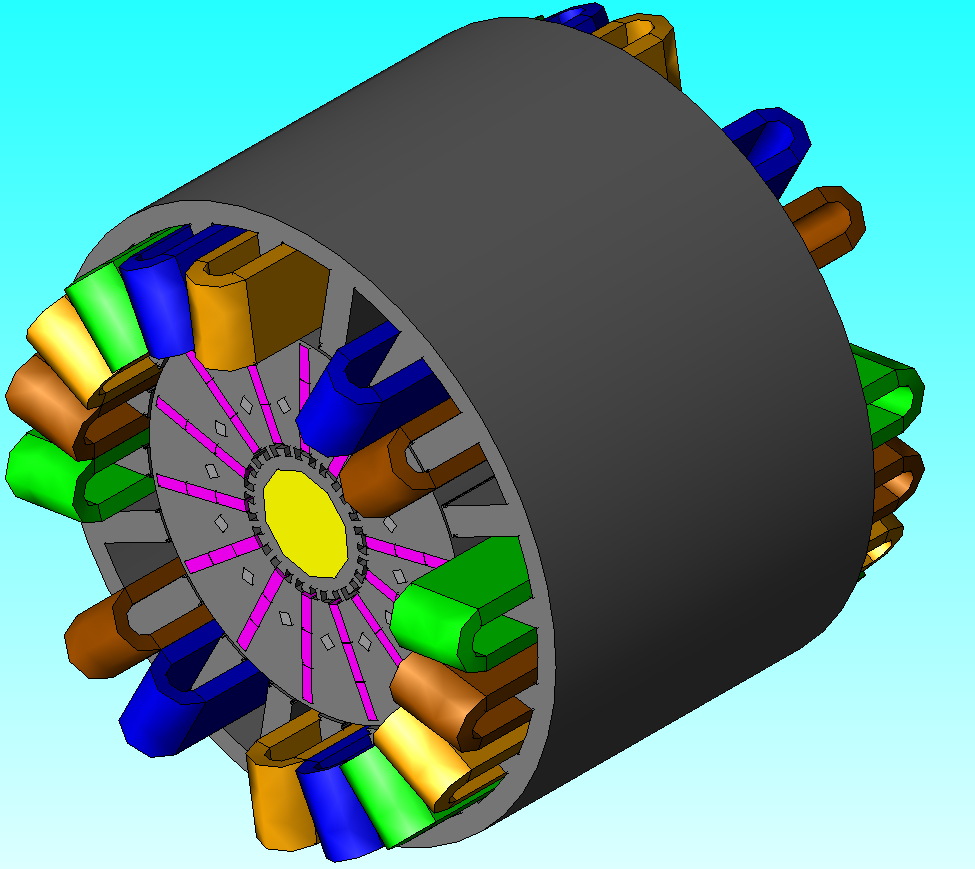
Modélisation machine sous JMAG Designer
Cette partie vise à prendre en compte l’impact de l’intégration du convertisseur statique rapide au niveau de la conception de la machine polyphasée. Elle est menée en interaction avec les tâches 1 et 3. Le niveau des tensions de bus est défini en fonction des composants de puissance, des contraintes de CEM et de la réalisation des bobinages. Le nombre de phases dépend de la répartition des contraintes en courant, aussi bien au niveau thermique que spatiale.
La structure du bobinage constitue un compromis entre simplicité de réalisation et minimisation de la génération de pertes par courants induits aux fréquences élevées. Le choix des aimants rotoriques intègre ces contraintes de température.
T2.2 : Commande de convertisseurs multi-cellulaires à composants rapides
Cette sous-tâche cherche les stratégies de commande rapprochées des cellules de commutation du convertisseur statique qui permettent, en utilisant les degrés de liberté disponibles, d’alimenter de façon optimale, – le circuit électrique en mode différentiel classiquement considéré pour la génération du couple de la machine électrique – le circuit électrique de mode commun à l’origine de problèmes de type CEM (courants d’arbre, surtensions, etc.) attendus dans le cadre d’une structure intégrée utilisant des composants faible pertes rapides. Cette tâche est menée en interaction avec la tâche 1.
Des modèles de mode différentiel et de mode commun s’établiront et identifieront la charge du convertisseur statique.
T2.3 : Détection et gestion des pannes, prises en compte des contraintes thermiques, électriques, électromagnétiques et magnétiques
Grâce à des modèles réduits développés dans les tâches 4 et 5, des prototypes virtuels permettront de tester l’impact des pannes et des reconfigurations de commande sur le fonctionnement de l’entraînement. Les procédés de détections de pannes issus des modèles établis seront par ailleurs implantés en temps réel.
Après détection et identification d’une panne, des reconfigurations de la commande sont nécessaires pour éviter la survenance de problèmes thermique et/ou mécanique réduisant la fiabilité fonctionnelle de l’entrainement. Ces reconfigurations de commande doivent tenir compte de la réduction du nombre de degrés de liberté de commande par le choix de stratégies adéquates qui, de plus, tiendront compte des contraintes supplémentaires dues aux dissymétries spatiale et thermique induites par la panne. Il sera nécessaire également de tenir compte des limitations en tension et courant induites par le convertisseur statique et la machine.
Organisation scientifique du projetCE2I